About

Connor McCann
Ph.D. Candidate, Mechanical Engineering
Harvard University
I’m currently a Ph.D. candidate in mechanical engineering at Harvard University studying robotics. My engineering interests include soft robotics, mechanism design, numerical simulation of deformable structures, and robotic grasping/manipulation. I’ve worked in a number of research labs and companies, and am excited to continue exploring these fascinating topics as I pursue a career in academic research. This site is meant as a place for me to describe more about myself and my experiences, keep running updates on my various on-going projects, and hopefully better convey the things that truly excite me.
A bit about me: I was born and raised in the Boston area, and was fortunate to be able to intern in a few labs at nearby universities throughout high school that really sparked my interest in research. This carried through into my undergraduate studies at Yale where I worked with Prof. Aaron Dollar to develop a parallel robot-inspired robotic hand for dexterous, within-hand manipulation. It was due to this project that I ultimately decided to pursue a career in academic research. Now. in my PhD studies at Harvard, I’m working with Profs. Conor Walsh and Katia Bertoldi to develop techniques for the characterization, modeling, and optimization of wearable soft robots in the presence of complex human body interactions. In particular, my work is centered on an assistive “exosuit” for medical and industrial shoulder joint assistance.
I invite you to explore the pages on my site to better get an idea of what I am like as an engineer and a person. Additional information can be found on my CV.
Research






Honors & Awards
Certificate of Distinction in Teaching
This certificate acknowledges a special contribution to the teaching of undergraduates in Harvard College. The award is based on student end-of-semester instructor reviews.
(2023, 2021)
NSF Graduate Research Fellowship
The National Science Foundation Graduate Research Fellowship Program recognizes and supports outstanding graduate students in NSF-supported science, technology, engineering, and mathematics disciplines who are pursuing research-based Master’s and doctoral degrees at accredited United States institutions.
(2018)
Donald Warren McCrosky Memorial Award
(2018)
Belle and Carl Morse Junior Scholarship
An article was published on the Yale SEAS website about my receipt of this award.
(2017)
ASME Student Mechanism and Robot Design Competition (2nd place)
I was awarded second place in the undergraduate competition for my work on the development of a novel Stewart-Gough platform-inspired dexterous robotic hand under the direction of Prof. Aaron Dollar at Yale.
(2017)
Student Design Showcase (3rd place)
My team from Yale’s Medical Device Design and Innovation course (MENG 404) and myself were awarded third place in the competition for our work developing a novel surgical guide for sternotomy procedures intended to improve clinical outcomes in this high-risk surgical procedure.
(2017)
Publications
Journal Papers
- C. M. McCann, C. J. Hohimer, C. T. O’Neill, H. T. Young, K. Bertoldi, C. J. Walsh, “In-Situ Measurement of Multi-Axis Torques Applied by Wearable Soft Robots for Shoulder Assistance,” IEEE Transactions on Medical Robotics and Bionics (T-MRB), vol. 5, no. 2, 2023. [pdf]
- E. Gallardo Hevia, C. M. McCann, M. Bell, N. Hyun, C. Majidi, K. Bertoldi, and R. J. Wood, “High-Gain Microfluidic Amplifiers: The Bridge between Microfluidic Controllers and Fluidic Soft Actuators,” Advanced Intelligent Systems (AIS), vol. 4, no. 2200122, 2022. [pdf]
- C. T. O’Neill, C. M. McCann, C. J. Hohimer, K. Bertoldi, and C. J. Walsh, “Unfolding Textile-Based Pneumatic Actuators for Wearable Applications,” Soft Robotics (SoRo), vol. 9, no. 1, 2021. [pdf]
- C. M. McCann*, V. V. Patel*, and A. M. Dollar, “The Stewart Hand: A Highly Dexterous, Six-Degrees-of-Freedom Manipulator Based on the Stewart-Gough Platform,” IEEE Robotics and Automation Magazine (RAM), vol. 28, no. 2, 2021. [pdf]
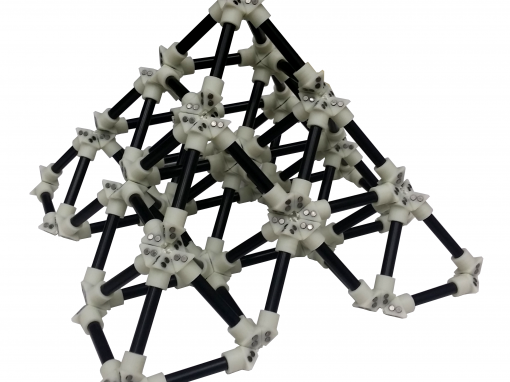
- Z. Xu, C. M. McCann, and A. M. Dollar, “Reconfigurable Modular Chain: A Reversible Material for Folding Three-Dimensional Lattice Structures,“ ASME Journal of Mechanisms and Robotics (JMR), vol. 9, no. 2, 2017. [pdf]
(* Indicates these authors contributed equally to this work.)
Conference Papers
- Y. Jin*, Y. M. Zhou*, C. M. McCann, T. Proietti, C. H. Rycroft, and C. J. Walsh, “A Data-based Approach to Simultaneously Align Local and Global Frames between an Inertial Measurement Unit (IMU) and an Optical Motion Capture System,” in IEEE International Conference on Biomedical Robotics & Biomechatronics (BioRob), 2022 [pdf]
- C. M. McCann and A. M. Dollar, “Analysis and Dimensional Synthesis of a Robotic Hand Based on the Stewart-Gough Platform,” in ASME International Design Engineering and Technical Conferences (IDETC), 2018. [pdf]
- C. M. McCann and A. M. Dollar, “Design of a Stewart Platform-Inspired Dexterous Hand for 6-DOF Within-Hand Manipulation,” in IEEE International Conference on Intelligent Robots and Systems (IROS), 2017. [pdf]
- Z. Xu, C. M. McCann, and A. M. Dollar, “Design of a Reconfigurable Modular Chain for Folding 3D Lattice Structures,” in ASME International Design Engineering and Technical Conferences (IDETC), 2016. [pdf]
(* Indicates these authors contributed equally to this work.)
Posters & Abstracts
- C. M. McCann, J. Arnold, C. Lehmacher, K. Bertoldi, and C. J. Walsh, “Hysteresis Modeling for Woven Textile Soft Actuators,” in Northeast Robotics Colloquium (NERC), 2023.
- C. M. McCann, J. Arnold, C. Lehmacher, K. Bertoldi, and C. J. Walsh, “Hysteresis Modeling for Woven Textile Soft Actuators,” in Society of Engineering Sciences (SES), 2023.
- D. Farrell, C. M. McCann, A. Delpy, A. E. Forte, R. Sourki, C. J. Walsh, and K. Bertoldi, “Textile metamaterials for Wearable Robotics,” in Society of Engineering Sciences (SES), 2023.
- D. Farrell, C. M. McCann, A. E. Forte, R. Sourki, C. J. Walsh, and K. Bertoldi, “Force Manipulation Across a Textile Metamaterial,” in American Physical Society (APS) March Meeting, 2023.
- C. Bösch, G. Bordiga, C. M. McCann, E. Medina, M. Yuen, Y. Jin, O. Araromi, A. Fichtner, and K. Bertoldi, “Autonomous Control of a Mobile Robot using a Mechanical Metamaterial “Brain”,” in American Physical Society (APS) March Meeting, 2023.
- C. M. McCann, C. J. Hohimer, C. T. O’Neill, H. T. Young, K. Bertoldi, and C. J. Walsh, “In-Situ Measurement of Multi-Axis Torques Applied by Wearable Soft Robots for Shoulder Assistance,” in Northeast Robotics Colloquium (NERC), 2022.
- Y. M. Zhou, C. J. Hohimer, H. T. Young, C. M. McCann, H. Cho, Y. Jin, P. Banzet, P. Murphy, D. Wagner, T. Cole, T. Proietti, and C. J. Walsh, “A Portable Inflatable Soft Wearable Robot for Supporting the Shoulder during Industrial Overhead Tasks,” in Northeast Robotics Colloquium (NERC), 2022.
- Y. Jin, Y. M. Zhou, C. M. McCann, T. Proietti, C. H. Rycroft, and C. J. Walsh, “Visualizing IMU Drift During Shoulder Kinematics Tracking,” in Northeast Robotics Colloquium (NERC), 2022.
- C. M. McCann, C. J. Hohimer, C. T. O’Neill, H. T. Young, K. Bertoldi, and C. J. Walsh, “In-Situ Measurement of Multi-Axis Torques Applied by Wearable Soft Robots for Shoulder Assistance,” in Gordon Research Conference & Seminar (GRC/GRS), 2022.
- D. Farrell, C. M. McCann, A. E. Forte, R. Sourki, C. J. Walsh, and K. Bertoldi, “Wearable Mechanical Textile Metamaterials,” in American Physical Society (APS) March Meeting, 2022.
- A. M. West, H. Mandl, C. M. McCann, N. Gunawardena, A. Morris, and J. Siefert, Alyssa Zinter, “A Novel Sternotomy Saw Guide Incorporating Integrated Rigid Fixation,” in Design of Medical Devices (DMD) Conference, 2017.
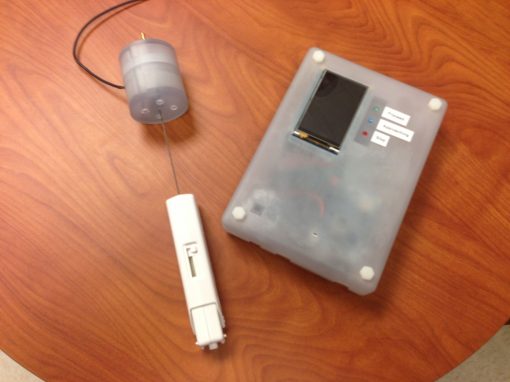
- K. Palmer, D. Alelyunas, C. M. McCann, K. Yoshimitsu, T. Kato, S.-E. Song, and N. Hata, “Development and evaluation of optical needle depth sensor for percutaneous diagnosis and therapies,” in SPIE Medical Imaging, 2014. [pdf]