
by Connor McCann | Jun 6, 2018
Soft Robotic Shoulder Exosuits, Harvard University In my Ph.D. research, I am seeking to better understanding the underlying mechanics behind a class of wearable shoulder-assistance soft robots developed previously at Harvard University. These systems utilize an...
by Connor McCann | Feb 1, 2018
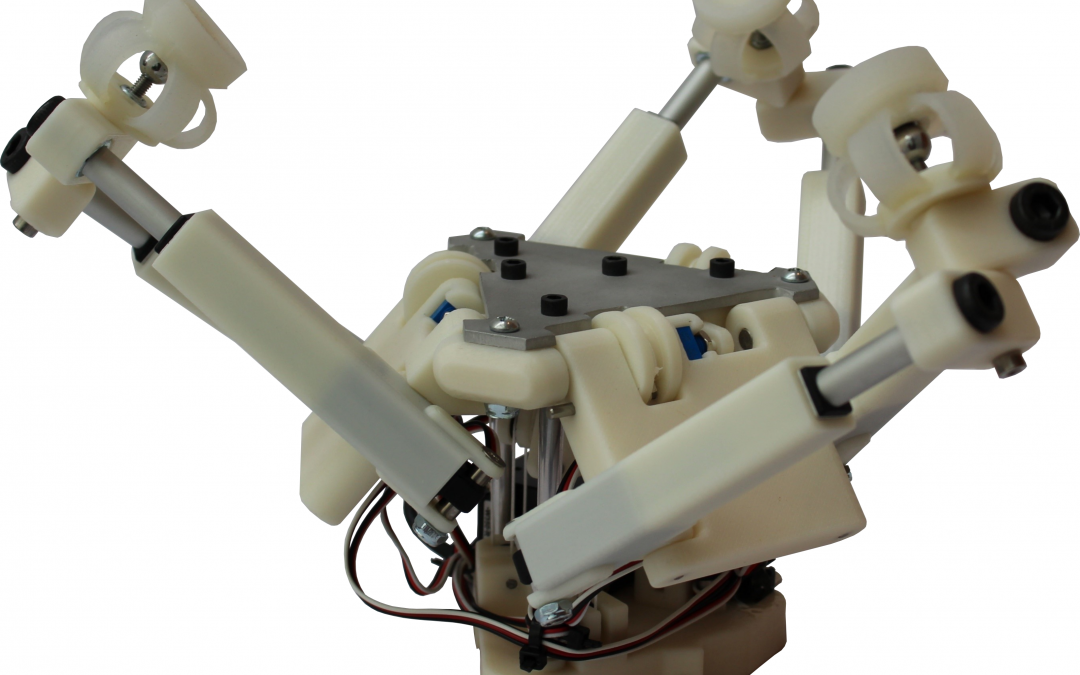
GRAB Lab, Yale University While working in Aaron Dollar’s GRAB Lab at Yale University, I led the development of a dexterous 6-degree-of-freedom robotic hand based on the common Stewart-Gough Platform parallel mechanism. The hand consist of six prismatic...
by Connor McCann | Jan 1, 2018
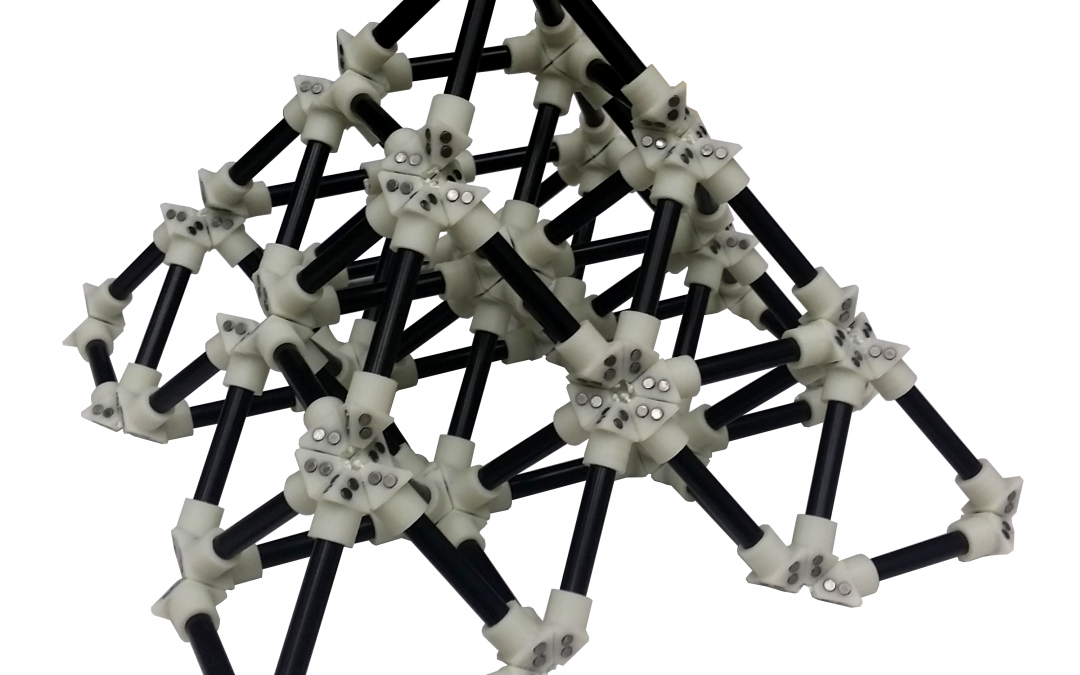
Reconfigurable Modular Trusses, Yale University During my time in Professor Aaron Dollar’s GRAB Lab at Yale University,I worked on a project aimed to develop a reconfigurable 3D-truss system, which can allow for the creation of arbitrary geometry space-frame...

by Connor McCann | Jul 1, 2016
Robotic Pigeon, MIT In the summer of 2014, I interned with MIT Professor Russ Tedrake in the Robot Locomotion Group. This lab focuses on developing and applying advanced robotic control theory, working extensively on motion planning for various humanoid, walking, and...

by Connor McCann | May 1, 2016
Surgical Needle Sensors, Harvard Medical School In the summer of 2013, I interned in the Surgical Navigation and Robotics Lab at Brigham and Women’s Hospital under Harvard Medical School Professor Nobuhiko Hata. The lab focuses on the development and testing of...
Recent Comments